| As of December 2013, I have been in the Mass Spectrometry Division of Agilent Technologies. Many of the papers I published in that time relate to some of the Agilent Labs projects from before then. In particular, the projects on AFMs and laser interferometry relate to work done in the Agilent Labs days. Since that time, I have extended some of the tools and methods I developed in the Agilent Labs days, primarily on my own time. I have also started writing some papers on control education, particularly in outreach to middle and high schoolers and to practicing engineers in control. |
|---|
| From April 1, 2000 until about December of 2013, I was at Agilent Labs. Thus, the work published in that time was largely done at Agilent Labs. In particular the papers on disk drive history and the tutorial on disk drives were done on my own time while I was at Agilent. They are most likely my swan song for the disk drive work. My new work involves a lot of different aspects of high speed measurement systems. One component of these that involves feedback is a Phase-Locked Loop, so one can expect to see some more PLL work show up here (if I'm lucky). |
| During most of my time at HP Labs, I worked on storage. In particular, I worked on both fixed magnetic disks (often referred to as hard drives) and optical disks (both magneto-optic and DVD+RW). Many of these papers are therefore about hard drives. |
New Control Education Paper(s)
| I will fill in more work when I can here. I've been writing a fair amount on making practical control accessible to more people. |
|---|
-
Practical Methods for Real World Control Systems , by Daniel Y. Abramovitch. This is a zeroth edition preview of my book on practical methods for real world control systems. This book is a refinement of the companion document I have been using for our Practical Methods Workshops at ACCs, DSCCs, MECC, etc. It will eventually get an official publication, but it still needs refinement. Your comments and feedback would be most helpful. There is a lot of material not found in most controls texts here. The tome has been quite popular with workshop attendees. As I push towards refining it for publication as an actual book, I am putting this draft here.
Just to be clear, this isn't really a book on control theory, although there is plenty of control theory in it. It assumes that you have one of those many fine books on basic control theory and have taken at least one control theory class using said fine book.
Instead, it is a book on what one has to do to put that theory into action; to use it on real systems. This is where I think there is a hole in much of what is taught. This is the hole that our workshop has tried to fill in some, and the book, the "tome", tries to give a more complete and cohesive view of that "hole filling" than we can do in a one-day workshop. Instead of focusing on "How do I prove theorem X?", it asks questions in the vein of "Which theories apply here?" and "What do we have to do to our algorithms to allow them to work in the real world?"
It's the difference between the beauty of control theory and the badass nature of control engineering.
-
What's a Control System and Why Should I Care? A whirlwind tour through the basics of control systems for students about to take that first class , by Daniel Y. Abramovitch, is being published on line here. This paper aims to provide some introduction, a cheat sheet, and some context for college level STEM students about to take that first controls class. In some cases, it provides context after the fact for folks who have taken that first controls class.
-
Introducing Feedback Control to Middle and High School STEM Students, Part 1: Basic Concepts , by Daniel Y. Abramovitch, was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims at showing controls researchers and educators how to introduce control theory concepts to middle and high school STEM students. Part 1 discusses how to introduce the basic concepts.
-
Introducing Feedback Control to Middle and High School STEM Students, Part 2: Control System Math , by Daniel Y. Abramovitch, was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims at showing controls researchers and educators how to introduce control theory concepts to middle and high school STEM students. Part 2 discusses how to introduce the math that gets used to understand control systems. Obviously, these students are highly unlikely to have had any of this math, but there is a way to guide them through the math concepts that we end up using.
-
Thoughts on Furthering the Control Education of Practicing Engineers , by Daniel Y. Abramovitch, was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims to share with controls researchers ideas about how to interact with practicing control engineers, helping them upgrade the methods that they use.
Recent Papers and Talks in Reverse Chronological Order
-
Practical Methods for Real World Control Systems , by Daniel Y. Abramovitch. This is a zeroth edition preview of my book on practical methods for real world control systems. This book is a refinement of the companion document I have been using for our Practical Methods Workshops at ACCs, DSCCs, MECC, etc. It will eventually get an official publication, but it still needs refinement. Your comments and feedback would be most helpful. There is a lot of material not found in most controls texts here. The tome has been quite popular with workshop attendees. As I push towards refining it for publication as an actual book, I am putting this draft here.
Just to be clear, this isn't really a book on control theory, although there is plenty of control theory in it. It assumes that you have one of those many fine books on basic control theory and have taken at least one control theory class using said fine book.
Instead, it is a book on what one has to do to put that theory into action; to use it on real systems. This is where I think there is a hole in much of what is taught. This is the hole that our workshop has tried to fill in some, and the book, the "tome", tries to give a more complete and cohesive view of that "hole filling" than we can do in a one-day workshop. Instead of focusing on "How do I prove theorem X?", it asks questions in the vein of "Which theories apply here?" and "What do we have to do to our algorithms to allow them to work in the real world?"
It's the difference between the beauty of control theory and the badass nature of control engineering.
-
(Preprint) Different Perceptions of PID Control in the Mechatronic and Process Control Worlds , by Daniel Y. Abramovitch, to be presented as part of a tutorial session at the 2025 American control Conference, Denver, CO, July 7--10, 2025. This paper and tutorial talk are an expansion of the plenary lecture I gave at the 4th IFAC Conference on Advances in Proportional-Integral-Derivative Control (a.k.a. IFAC PID 2024) entitled, Unintentional Expertise: How the Necessity of Working with PID Controllers Across Multiple Domains Fundamentally Improved My Understanding of Control Theory and Practice. The talk was a big success and I wanted to turn it into a paper, but for such a long talk the only reasonable venue is a main tutorial talk. The paper expands on ideas in the talk, extending the comparison of loop shaping in the mechatronic and process worlds, and showing commonality the results from both methods.
-
A Discussion on Discretization and Practical Tradeoffs of the ZOH Equivalent , by Daniel Y. Abramovitch, was presented as part of a tutorial session at the 2023 Modeling, Estimation, and Control Conference, Lake Tahoe, NV, USA, October 2-5, 2023. It is not published in the conference proceedings. It presents a tutorial on discretization issues, particularly how difficult it is to get symbolic models from the ZOH equivalent of full continuous-time models for all but the simplest systems. This is combined with a numerical evaluation of the differences between these full-model ZOH equivalent and an alternate ``one-block-at-a-time'' (OBLAAT) method. The difference is so small in these examples that one should feel free to use intuition preserving OBLAAT methods with little fear of lost accuracy.
-
A Tutorial on the Biquad and Bilinear State-Space Structures , by Daniel Y. Abramovitch, was presented as part of a tutorial session at the 2023 Modeling, Estimation, and Control Conference, Lake Tahoe, NV, USA, October 2-5, 2023. It is not published in the conference proceedings. It presents a tutorial on state-space structures that allow a tight coupling between the states of the continuous and discrete-time models.
-
A Tutorial on Real-Time Computing Issues for Control Systems , by Daniel Y. Abramovitch,Sean Andersson, Kam K. Leang, William Nagel, and Shalom Ruben, was given at the 2023 American Control Conference, San Diego, CA, USA, May 31-June 2, 2023, and is in the conference proceedings. It presents a tutorial on the elements of computation in a real-time control system. Unlike conventional computation or even computation in digital signal processing systems, computation in a feedback loop must be sensitive to issues of latency and noise around the loop.
-
Using Feedback Control Principles as Guiding Metaphors for Business Processes , by Daniel Y. Abramovitch, was given at the 2022 American Control Conference, Atlanta, GA, USA, June 8-10, 2022, and is in the conference proceedings. It relates to using the basic principles of control as metaphors for guiding business process decisions and improvement. This was part of a special tutorial session for which the main tutorial paper is the next entry.
-
Managerial Decision Making as an Application for Control Science and Engineering , by Tariq Samad, Daniel Y. Abramovitch, Michael Lees, Iven Mareels, R. Russell Rhinehart, Francesco Cuzzola, Benny Grosman, Oleg Gusikhin, Esko Juuso, Bhagyesh V. Patil, and Stefan Pickl, was given at the 2022 American Control Conference, Atlanta, GA, USA, June 8-10, 2022, and is in the conference proceedings. It is the main tutorial paper for a session on using control principles in business and decision applications. My solo paper in that session is above.
-
Determining Kalman Filter Input Noises Using PES Pareto , by Daniel Y. Abramovitch, was given at the 2021 American Control Conference, New Orleans, LA, USA, May 25-28, 2021, and is in the conference proceedings. It relates to using PES Pareto to determine the input noise variances that are critical to generating a Kalman filter.
-
Bridging the Gap: Using Real World Problems to Unveil Deep Control Principles , by Daniel Y. Abramovitch. This is a plenary lecture given at the 2020 IEEE Conference on Control Systems Technology, Montreal, Canada, August 24-26, 2020. There is no paper, but this is the video of the talk.
-
A Tutorial on PES Pareto Methods for Analysis of Noise Propagation in Feedback Loops , by Daniel Y. Abramovitch, was given at the 2020 IEEE Conference on Control Systems Technology, Montreal, Canada, August 24-26, 2020, and is in the conference proceedings. It reintroduces PES Pareto to the world in a tutorial fashion, extending it beyond the original disk drive centric view.
Due to the Covid-19 pandemic, the CCTA 2020 was virtual. The recorded video of the talk is here.
-
The Demod Squad: A Tutorial on the Utility and Methodologies for Using Modulated Signals in Feedback Loops , by Daniel Y. Abramovitch, was given at the 2020 IEEE Conference on Control Systems Technology, Montreal, Canada, August 24-26, 2020, and is in the conference proceedings. It is a tutorial on how control engineers can use improved demodulation methods to lower noise sensitivity and latency of control systems. It is the next logical step once one has understood PES Pareto..
Due to the Covid-19 pandemic, CCTA 2020 was virtual. The recorded video of the talk is here.
-
Improved Peak Detection for Mass Spectrometry via Augmented Dominant Peak Removal , by Daniel Y. Abramovitch, was given at the 2020 American Control Conference, Denver, CO, USA, July 1-3, 2020, and is in the conference proceedings. It relates to using control and system ID methods to improve the peak detection done in mass spectrometers.
Due to the Covid-19 pandemic, ACC 2020 was virtual. The recorded video of the talk is here.
-
What's a Control System and Why Should I Care? A whirlwind tour through the basics of control systems for students about to take that first class , by Daniel Y. Abramovitch, is being published on line here. This paper aims to provide some introduction, a cheat sheet, and some context for college level STEM students about to take that first controls class. In some cases, it provides context after the fact for folks who have taken that first controls class.
-
Introducing Feedback Control to Middle and High School STEM Students, Part 1: Basic Concepts , by Daniel Y. Abramovitch, was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims at showing controls researchers and educators how to introduce control theory concepts to middle and high school STEM students. Part 1 discusses how to introduce the basic concepts.
-
Introducing Feedback Control to Middle and High School STEM Students, Part 2: Control System Math , by Daniel Y. Abramovitch, was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims at showing controls researchers and educators how to introduce control theory concepts to middle and high school STEM students. Part 2 discusses how to introduce the math that gets used to understand control systems. Obviously, these students are highly unlikely to have had any of this math, but there is a way to guide them through the math concepts that we end up using.
-
Thoughts on Furthering the Control Education of Practicing Engineers , by Daniel Y. Abramovitch, was presented at the 2019 IFAC Advances on Control Education Conference (IFAC-ACE), Philadelphia, PA, USA, July 7-9, 2019, and is in the conference proceedings. This paper aims to share with controls researchers ideas about how to interact with practicing control engineers, helping them upgrade the methods that they use.
-
A Comparison of the δ Parameterization and the τ Parameterization , by Daniel Y. Abramovitch, was given at the 2019 American Control Conference, Philadelphia, PA, USA, July 10-12, 2019, and is in the conference proceedings.
-
Adding Rigid Body Modes and low pass Filters to the Biquad State Space and Multinotch , by Daniel Y. Abramovitch, was given at the 2018 American Control Conference, June 27-29, 2018, Milwaukee, USA, and is in the conference proceedings.
-
A Comparison of Δ Coefficients and the δ Parameterization, Part II: Signal Growth , by Daniel Y. Abramovitch, was given at the 2018 American Control Conference, June 27-29, 2018, Milwaukee, USA, and is in the conference proceedings.
-
A Comparison of Δ Coefficients and the δ Parameterization, Part I: Coefficient Accuracy , by Daniel Y. Abramovitch, was given at the 2017 American Control Conference, May 24-26, 2017, Seattle, USA, and is in the conference proceedings.
-
Trying to Keep it Real: 25 Years of Trying to Get the Stuff I Learned in Grad School to Work on Mechatronic Systems , by Daniel Y. Abramovitch, was given at the 2015 IEEE Conference on Control Applications (CCA), Part of 2015 IEEE Multi-Conference on Systems and Control September 21-23, 2015. Sydney, Australia, and is in the conference proceedings.
-
Built-In Stepped-Sine Measurements for Digital Control Systems , by Daniel Y. Abramovitch, was given at the 2015 IEEE Conference on Control Applications (CCA), Part of 2015 IEEE Multi-Conference on Systems and Control September 21-23, 2015. Sydney, Australia, and is in the conference proceedings. This paper describes a way of building a dynamics analyzer into control systems.
-
A Unified Framework for Analog and Digital PID Controllers , by Daniel Y. Abramovitch, was given at the 2015 IEEE Conference on Control Applications (CCA), Part of 2015 IEEE Multi-Conference on Systems and Control September 21-23, 2015. Sydney, Australia, and is in the conference proceedings. This paper describes a way of thinking about analog and digital PID controllers in a unified way.
-
Mitigating Rotational Disturbances on a Disk Drive with Mismatched Linear Accelerometers by Daniel Y. Abramovitch and George Hsu was given at the 2015 IEEE Conference on Control Applications (CCA), Part of 2015 IEEE Multi-Conference on Systems and Control September 21-23, 2015. Sydney, Australia, and is in the conference proceedings.
-
The Multinotch, Part I: A Low Latency, High Numerical Fidelity Filter for Mechatronic Control Systems , by Daniel Y. Abramovitch, was given at the 2015 American Controls Conference, July, 2015, in Chicago, and is in the conference proceedings. This paper describes how to use a specific form of a biquad cascade to get a loop shaping filter that is numerically robust, physically intuitive, and yet still allows minimal computational latency via pre-calculation.
-
The Multinotch, Part II: Extra Precision Via Δ Coefficients , by Daniel Y. Abramovitch, was given at the 2015 American Controls Conference, July, 2015, in Chicago, and is in the conference proceedings. This paper describes a way of improving the coefficient accuracy in the multinotch, via Δ Coefficients, which exploit the biquad structure to give near floating point resolution with virtually the same speed as fixed point math. Some people confuse this with the δ parameterization, but it is different.
-
The Discrete Time Biquad State Space Structure: Low Latency with High Numerical Fidelity , by Daniel Y. Abramovitch, was given at the 2015 American Controls Conference, July, 2015, in Chicago, and is in the conference proceedings. This paper maps the great properties of the multinotch into a digital state space structure that I call the discrete time biquad state space (BSS).
-
The Continuous Time Biquad State Space Structure , by Daniel Y. Abramovitch, was given at the 2015 American Controls Conference, July, 2015, in Chicago, and is in the conference proceedings. This paper creates a continuous time biquad state space (BSS), which is surprisingly useful for modeling when combined with the discrete BSS.
-
A Tutorial on Laser Interferometry for Precision Measurements , by Russell Loughridge and Daniel Y. Abramovitch, was given at the 2013 American Controls Conference, June, 2013, in Washington, D.C., and is in the conference proceedings. This paper is a tutorial on how laser interferometry is used for precision measurements.
-
Quintessential Phase: A Method of Mitigating Turbulence Effects in Interferometer Measurements of Precision Motion , by Eric Johnstone and Daniel Y. Abramovitch, was given at the 2013 American Controls Conference, June, 2013, in Washington, D.C., and is in the conference proceedings. This paper describes a way of mitigating the effects of turbulence in interferometer measurements via use of precise estimators. It is the work that necessitated the creation of the Biquad State Space structure.
-
Keeping It Real Paper

In 2014 I was asked to present a keynote lecture at the 2015 Multi-Conference on System and Control. I was given broad latitude and in thinking about recent results, I realized that I should try to discuss the difficulty in doing the "fancy" control stuff that we learned in graduate school on real industrial systems, in particular on mechatronic systems with lots of lightly damped dynamics (which I call high-Q systems). Plunking down the blocks of work and trying to tie them together led to a somewhat unique perspective, which I tried to put in the companion paper, below. -
Trying to Keep it Real: 25 Years of Trying to Get the Stuff I Learned in Grad School to Work on Mechatronic Systems , by Daniel Y. Abramovitch, was given at the 2015 IEEE Conference on Control Applications (CCA), Part of 2015 IEEE Multi-Conference on Systems and Control September 21-23, 2015. Sydney, Australia, and is in the conference proceedings.
-
-
ID for Mechatronic Systems Papers

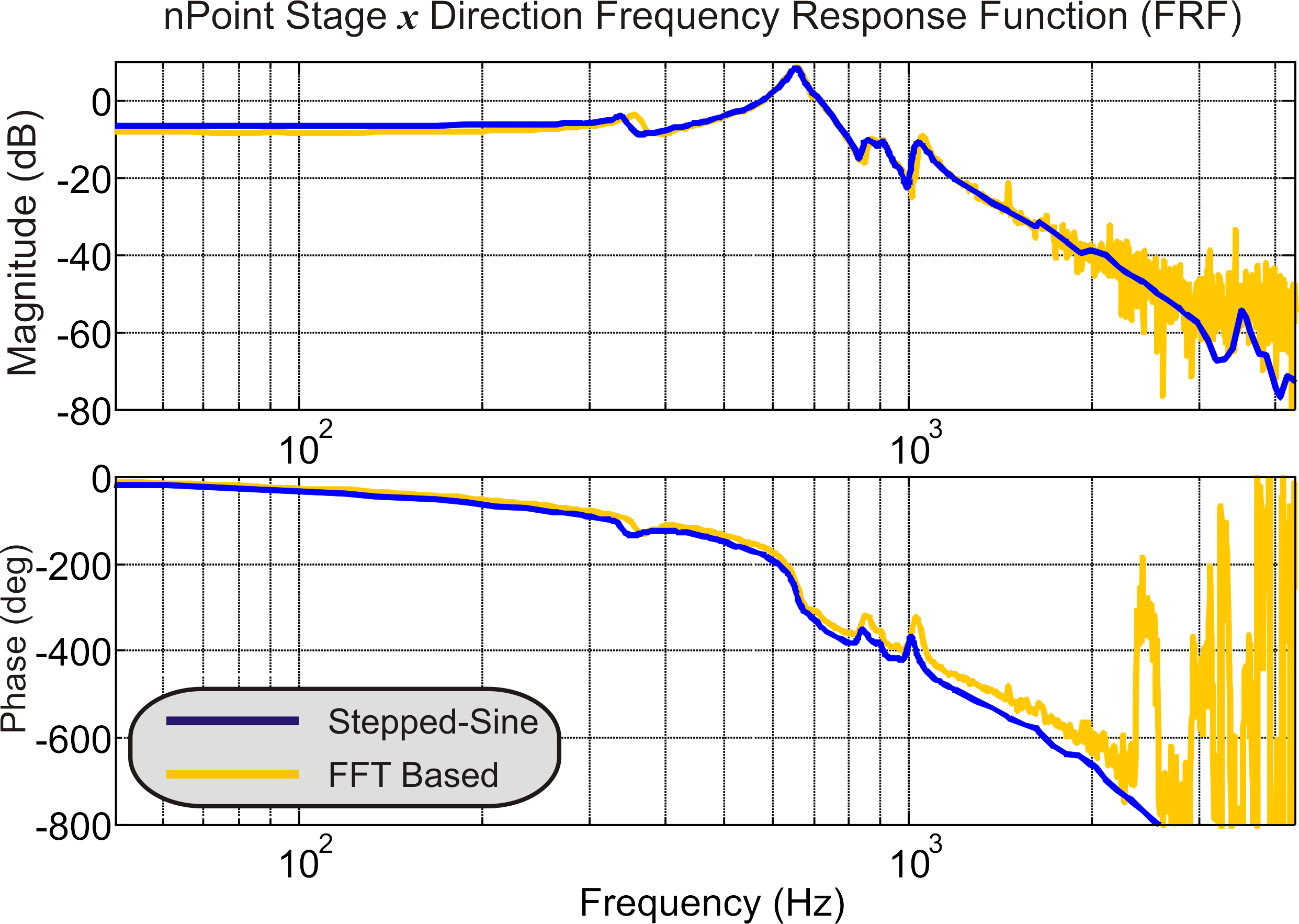
One of the things that makes control of mechatronic systems difficult is getting a good model. For systems with lots of lightly damped dynamics, most time domain methods and FFT based frequency response methods do not work. Part of the solution is what academics call stepped-sine or sine-dwell, but which was called swept-sine when invented in industry. The stand alone instruments that do this are expensive and generally old. This work talks about how to build that capability into the digital controller running the systems. -
Built-In Stepped-Sine Measurements for Digital Control Systems , by Daniel Y. Abramovitch, was given at the 2015 IEEE Conference on Control Applications (CCA), Part of 2015 IEEE Multi-Conference on Systems and Control September 21-23, 2015. Sydney, Australia, and is in the conference proceedings.
This paper describes a way of building a dynamics analyzer into control systems.
-
-
PID Control Papers
My work on control for high speed atomic force microscopes (AFMs) led me to delve much deeper into PID (Proportional + Integral + Derivative) control. PIDs, when used in conjuction with mutlinotch filters, can pretty much control most Single Input, Single Output (SISO) mechatronic systems. -
A Unified Framework for Analog and Digital PID Controllers , by Daniel Y. Abramovitch, was given at the 2015 IEEE Conference on Control Applications (CCA), Part of 2015 IEEE Multi-Conference on Systems and Control September 21-23, 2015. Sydney, Australia, and is in the conference proceedings.
This paper describes a way of thinking about analog and digital PID controllers in a unified way.
-
Semi-Automatic Tuning of PID Gains for Atomic Force Microscopes , by Daniel Y. Abramovitch, Storrs Hoen, and Richard Workman, was given at the 2008 American Controls Conference, June, 2008, and is in the conference proceedings.
This paper uses the realization that a PID controller can look like a notch filter to design the PID as a notch filter. By that I don't mean a notch that zeros out the response at a frequency, but as an anti-resonance. In particular, when the resonance of an AFM actuator is removed in an inverse dynamics type of control. The key then is how to identify the resonance, and this method uses a frequency domain, and then a severely constrained curve fit. The end result is a PID that really improves the performance of an AFM.
-
-
Game of Biquads Papers
My work on control for high speed atomic force microscopes (AFMs) led to some fairly interesting work on filtering for loop shaping and eventually led to a new and very effective state space structure, the Biquad State Space. These 4 papers, first published at the 2015 American Control Conference, give the outline of the method which has more to yield. -
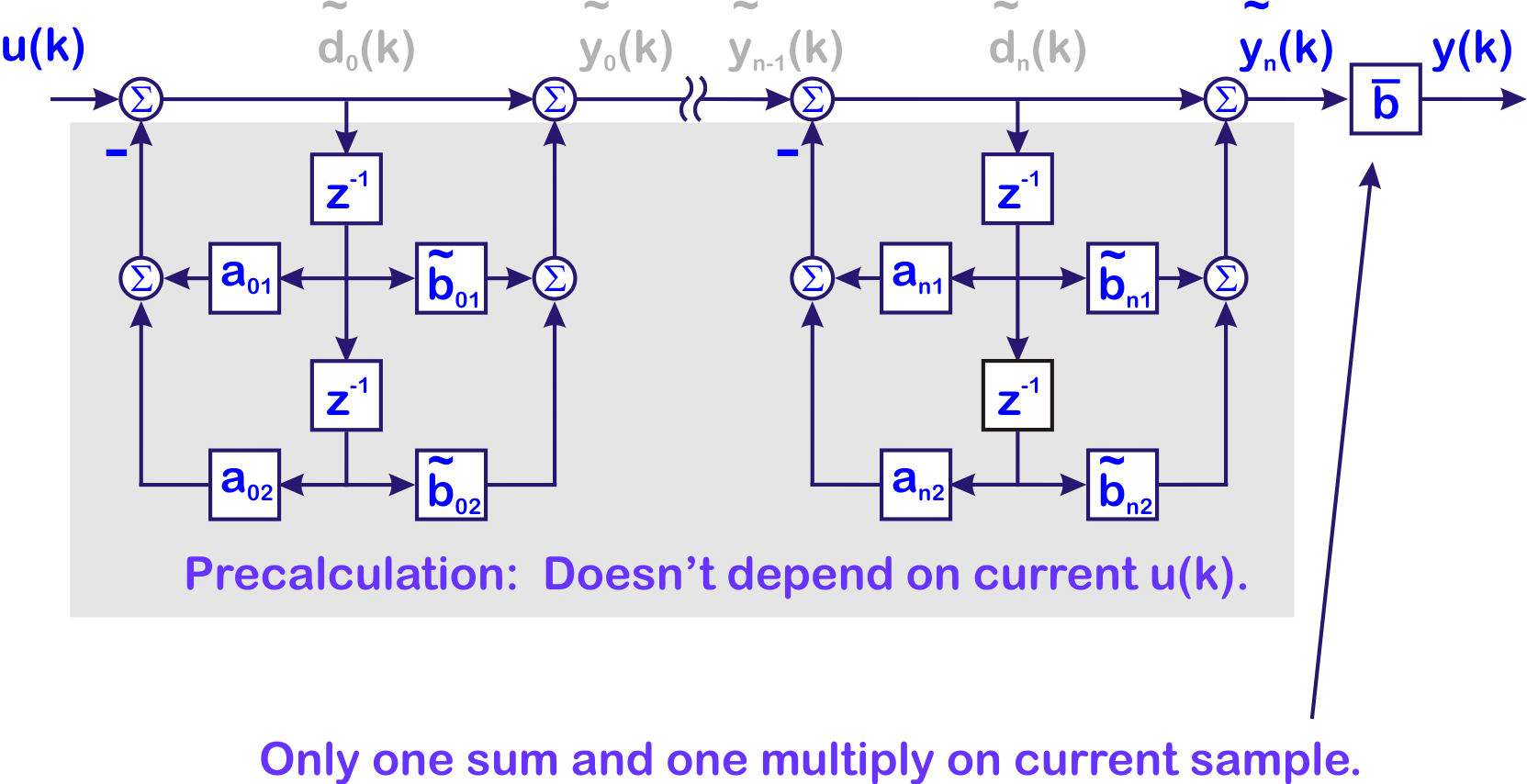
The Multinotch, Part I: A Low Latency, High Numerical Fidelity Filter for Mechatronic Control Systems , by Daniel Y. Abramovitch, was given at the 2015 American Controls Conference, July, 2015, in Chicago, and is in the conference proceedings.
This paper describes how to use a specific form of a biquad cascade to get a loop shaping filter that is numerically robust, physically intuitive, and yet still allows minimal computational latency via pre-calculation.
-
The Multinotch, Part II: Extra Precision Via Δ Coefficients , by Daniel Y. Abramovitch, was given at the 2015 American Controls Conference, July, 2015, in Chicago, and is in the conference proceedings.
This paper describes a way of improving the coefficient accuracy in the multinotch, via Δ Coefficients, which exploit the biquad structure to give near floating point resolution with virtually the same speed as fixed point math. Some people confuse this with the δ parameterization, but it is different.
-
The Discrete Time Biquad State Space Structure: Low Latency with High Numerical Fidelity , by Daniel Y. Abramovitch, was given at the 2015 American Controls Conference, July, 2015, in Chicago, and is in the conference proceedings.
This paper maps the great properties of the multinotch into a digital state space structure that I call the discrete time biquad state space (BSS).
-
The Continuous Time Biquad State Space Structure , by Daniel Y. Abramovitch, was given at the 2015 American Controls Conference, July, 2015, in Chicago, and is in the conference proceedings.
This paper creates a continuous time biquad state space (BSS), which is surprisingly useful for modeling when combined with the discrete BSS.
-
Adding Rigid Body Modes and low pass Filters to the Biquad State Space and Multinotch , by Daniel Y. Abramovitch, was given at the 2018 American Control Conference, June 27-29, 2018, Milwaukee, USA, and is in the conference proceedings.
The multinotch (MN) and Biquad State Space (BSS) papers provided a new paradigm for implementing controllers, filters, and state space structures. However, I felt that I had left out some key building blocks to make the systems most generally useful. In particular, things like rigid body modes and low pass filters were not described. Furthermore, a new state space construct that can be substituted for a biquad was introduced: the BiLinear State Space structure. This allows rigid body components of a BSS to have readily available terms, such as position and velocity.
-
A Comparison of Δ Coefficients and the δ Parameterization, Part I: Coefficient Accuracy , by Daniel Y. Abramovitch, was given at the 2017 American Control Conference, May 24-26, 2017, Seattle, USA, and is in the conference proceedings.
The confusion between the Δ Coefficients and the δ Parameterization prompted me to take a look at these from the coefficient accuracy perspective. The results are here.
-
A Comparison of Δ Coefficients and the δ Parameterization, Part II: Signal Growth , by Daniel Y. Abramovitch, was given at the 2018 American Control Conference, June 27-29, 2018, Milwaukee, USA, and is in the conference proceedings.
In a follow on to the previous paper, this discusses signal growth which is not dealt with by the Δ Coefficients, but is dealt with by the δ Parameterization. What is interesting here is why the δ Parameterization succeeds here and it's not what was originally advertised.
-
A Comparison of the δ Parameterization and the τ Parameterization , by Daniel Y. Abramovitch, was given at the 2019 American Control Conference, Philadelphia, PA, USA, July 10-12, 2019, and is in the conference proceedings.
In a follow on to the paper above, this compares the δ Parameterization (based on a forward rectangular rule discrete equivalent) with a new τ Parameterization (based on a trapezoidal rule discrete equivalent). There are some interesting results here, but not what I would have expected. Still, it's a unique study.
| Okay, there's explanation in the rest, but I'll just put these in reverse chronological order, so most recent ones are at the top. |
|---|
Interferometer Measurement Papers
|
|---|
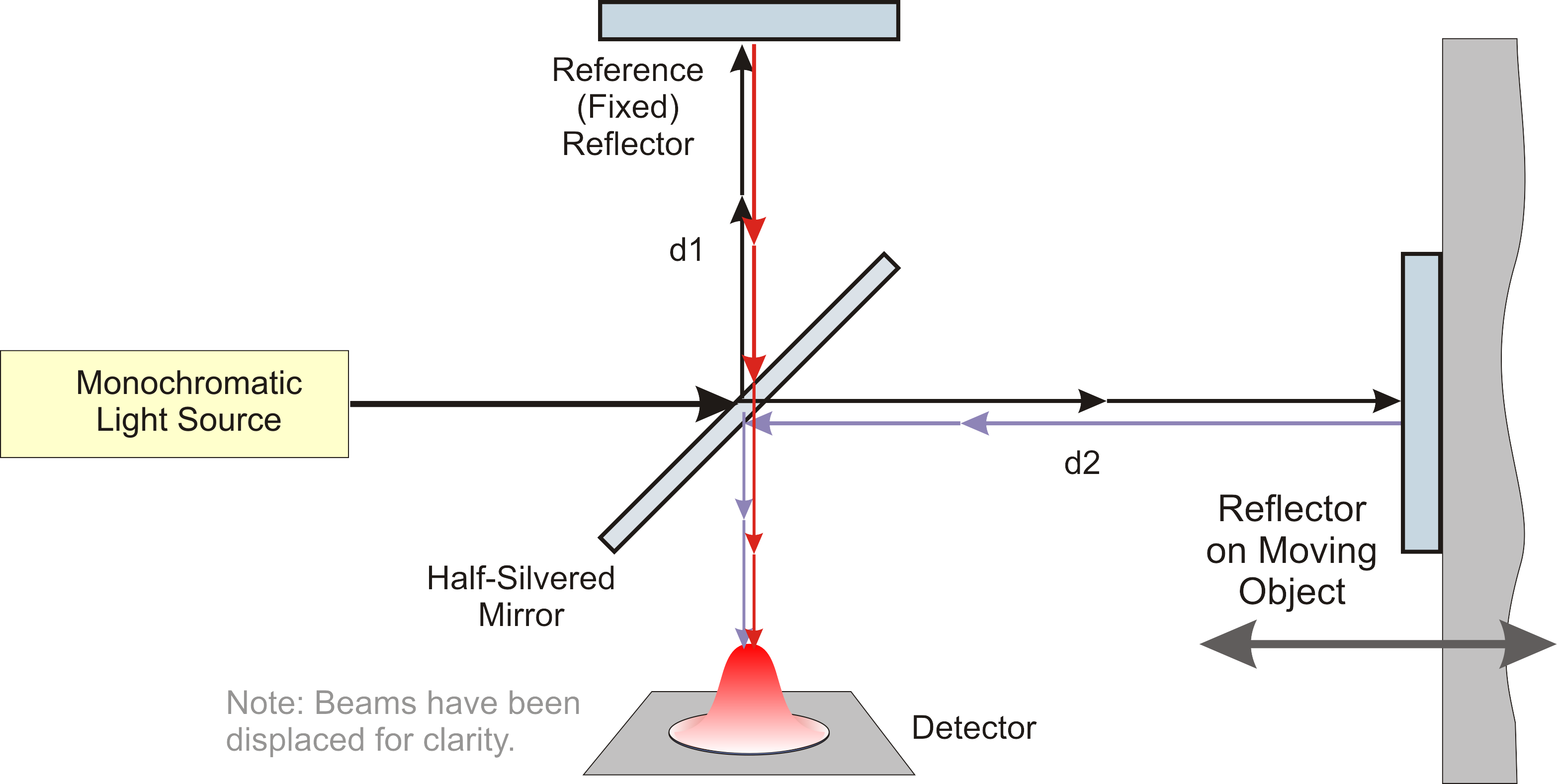
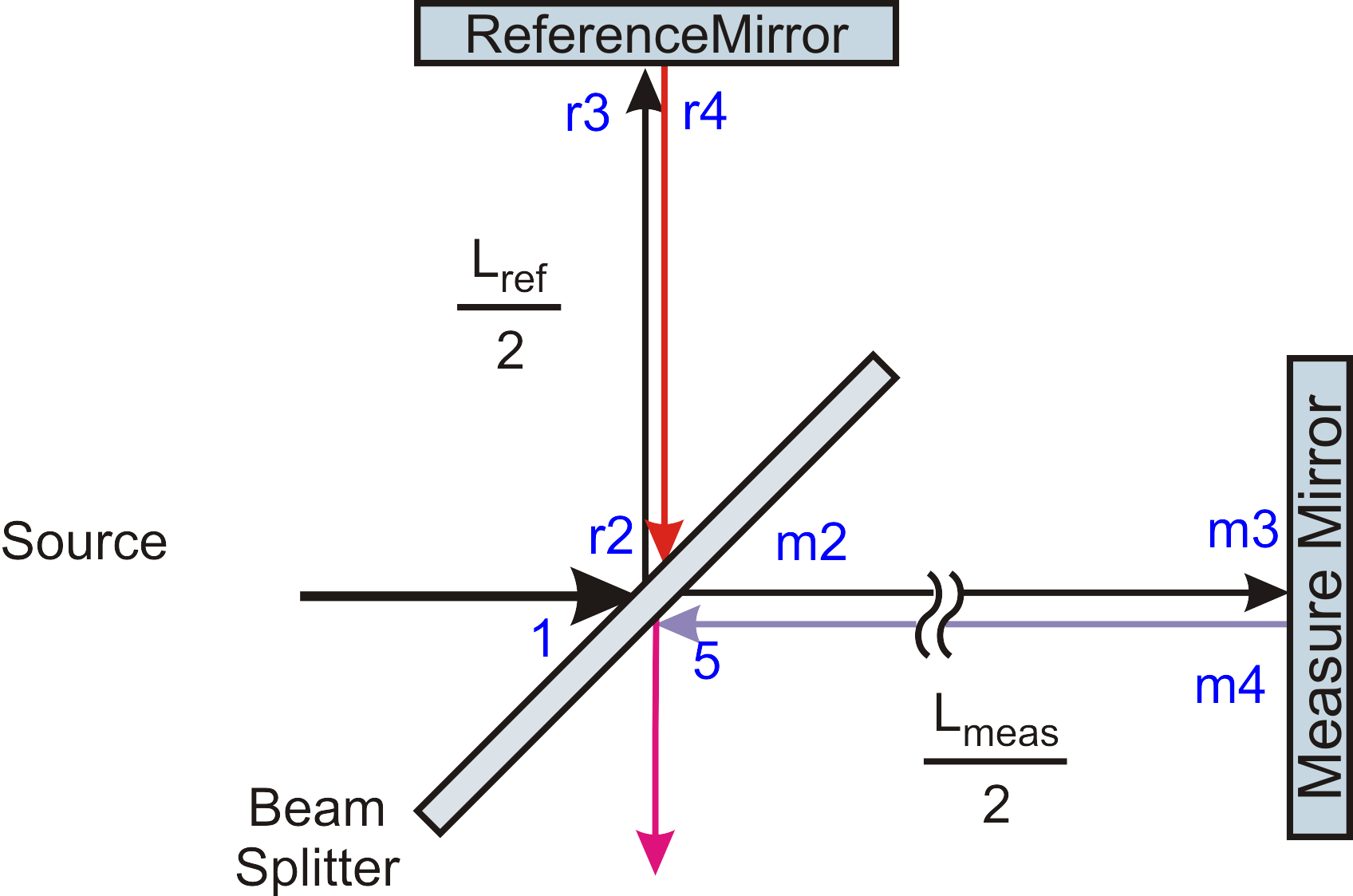
| A pictorial view of displacement measurement with a Michelson Interferometer. Below is a zoomed in view. |
|
-
A Tutorial on Laser Interferometry for Precision Measurements , by Russell Loughridge and Daniel Y. Abramovitch, was given at the 2013 American Controls Conference, June, 2013, in Washington, D.C., and is in the conference proceedings. This paper is a tutorial on how laser interferometry is used for precision measurements.
-
Quintessential Phase: A Method of Mitigating Turbulence Effects in Interferometer Measurements of Precision Motion , by Eric Johnstone and Daniel Y. Abramovitch, was given at the 2013 American Controls Conference, June, 2013, in Washington, D.C., and is in the conference proceedings. This paper describes a way of mitigating the effects of turbulence in interferometer measurments via use of precise estimators. It is the work that necessitated the creation of the Biquad State Space structure.
AFM Control Papers
|
|---|
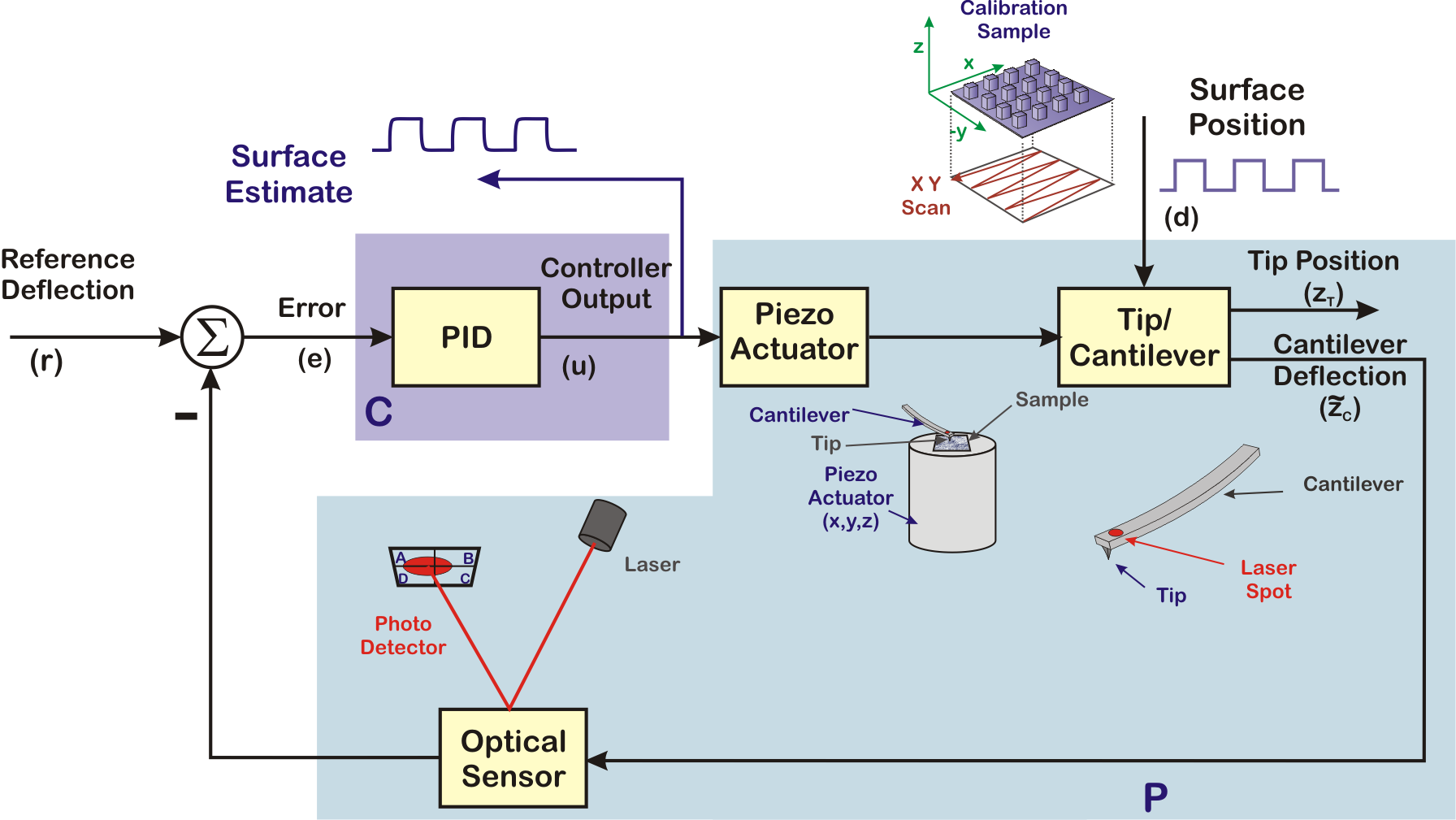
A pictorial view of an AFM control loop.
|
| These papers are part of my work on atomic force microscopes (AFMs). Specifically, I am working on improving the user experience with these. Luckily, as these are electro-mechanical measurment systems (often called mechatronics) many of the issues that arise in AFMs are related to advanced control topics. |
-
Low Latency Demodulation for Atomic Force Microscopes, Part I Efficient Real-Time Integration , by Daniel Y. Abramovitch, was given at the 2011 American Controls Conference, June, 2011, in San Francisco, and is in the conference proceedings.
This paper describes a method of efficient digital demodulation for AC mode signals in an AFM. Part I describes the basic mixing and integration method that rapidly provide demodulated I and Q signals.
-
Low Latency Demodulation for Atomic Force Microscopes, Part II: Efficient Calculation of Magnitude and Phase , by Daniel Y. Abramovitch, was given at the 2011 IFAC World Congress, August, 2011, in Milan, Italy, and is in the conference proceedings.
This paper describes a method of efficient digital demodulation for AC mode signals in an AFM. Part II describes efficient methods of extracting magnitude and phase from the integrated I and Q signals.
-
A Tale of Three Actuators: How Mechanics, Business Models and Position Sensing Affect Different Mechatronic Servo Problems , by Daniel Y. Abramovitch, was given at the 2009 American Controls Conference, June, 2009, and is in the conference proceedings.
This paper takes an overview of the control of hard disks, optical disks, and AFMs. It brings in how the different mechanisms and the different business models affect the choices one makes in designing the controller.
-
Semi-Automatic Tuning of PID Gains for Atomic Force Microscopes , by Daniel Y. Abramovitch, Storrs Hoen, and Richard Workman, was given at the 2008 American Controls Conference, June, 2008, and is in the conference proceedings.
This paper uses the realization that a PID controller can look like a notch filter to design the PID as a notch filter. By that I don't mean a notch that zeros out the response at a frequency, but as an anti-resonance. In particular, when the resonance of an AFM actuator is removed in an inverse dynamics type of control. The key then is how to identify the resonance, and this method uses a frequency domain, and then a severely constrained curve fit. The end result is a PID that really improves the performance of an AFM.
-
A Tutorial on the Mechanisms, Dynamics, and Control of Atomic Force Microscopes , by Daniel Y. Abramovitch, Sean B. Andersson, Lucy Y. Pao, and George Schitter, was given at the 2007 American Controls Conference, June, 2007, and is in the conference proceedings.
This was a 4 author tutorial paper for an invited tutorial session that we generated. It went over pretty well. It explains from a control perspective, exactly how an AFM works and what might be needed to improve its performance.
-
A Survey of Non-Raster Scan Methods with Application to Atomic Force Microscopy , by Sean B. Andersson and Daniel Y. Abramovitch, was given at the 2007 American Controls Conference, June, 2007, and is in the conference proceedings.
If we could scan only in areas where there are interesting things to image, that would substantially cut imaging time in an AFM. This paper looks at how non-raster scan methods are used in other areas and how they might be applied to AFMs.
Phase-Locked Loops, Part IV: PLL Simulation Papers
| The problem of simulating a PLL is made more difficult by the fact that the system is extremely stiff. These two papers describe how I solved this problem using what I like to refer to as: elegant brute force. These two papers describe some work that I did in 2002 to simulate some high speed communication PLLs. In doing so, I had to teach myself C++ (for about the 4th time) and then use it to build up component class libraries. |
|---|
-
Efficient and Flexible Simulation of Phase Locked Loops, Part I: Simulator Design , was given at the 2008 American Controls Conference, June, 2008, and is in the conference proceedings. This one describes how the simulator was constructed.
-
Efficient and Flexible Simulation of Phase Locked Loops, Part II: Post Processing and a Design Example , was given at the 2008 American Controls Conference, June, 2008, and is in the conference proceedings. This one describes the post processing tools that could be hung off of the basic simulation, including a simulated spectrum analyzer, jitter estimation, histograms, etc.
Papers on the History of Control
| I have also written a few papers on the history of control. One of these was an interview with Professor Boris Kogan, who was the leader of the team that built the Soviet Union's first analog computer. The other was co-authored with Gene Franklin and was a history of the IEEE Control Systems Society. |
|---|
-
Analog Computing in the Soviet Union: An Interview with Boris Kogan , appeared in the June 2005 issue of the IEEE Control Systems Magazine.
-
Fifty Years in Control: The Story of the IEEE Control Systems Society , by Daniel Y. Abramovitch and Gene F. Franklin. appeared in the December 2004 issue of the IEEE Control Systems Magazine.
The Outrigger: A Prehistoric Feedback Mechanism:

|
|---|
| I was standing on Waikiki Beach in the summer of 2002 with my then 3-year old. He was nervous about the water, so we were making sand castles. At some point, he turned around, pointed to the outrigger part of an outrigger canoe, and asked, "How does that work?" So, I started explaining how when the boat tips one way, the buoyancy of the outrigger causes it to right itself and when the boat tips the other way, the weight of the outrigger causes it to tip back the other way. As I am describing this, I realize I am describing a feedback mechanism. A cursory knowledge of Polynesian history made me realize that this was probably a very old feedback mechanism. Thus, started my trek to establish the outrigger as an ancient feedback mechanism. Mahalo. |
-
This paper was presented at a Special History Plenary Session of the 2003 IEEE Conference on Decision and Control and is in the conference proceedings.
-
A later version was published in the August, 2005 issue of the IEEE Control Systems Magazine.
The significance of this paper is that it shows that the outrigger is a human built feedback mechanism that predates the water clock by at least a millenium. This means that Chapter 1 of a lot of controls books are going to have to change in the next edition. I did almost all of this in the evenings and at lunch time, but I did get a lot of reference help from the Agilent Labs Library.
Phase-Locked Loops, Part III: Lyapunov Redesign of Classical Digital PLLs
| The work on the PLL tutorial paper as well as the time I spent simulating PLLs for our jitter measurement project made me realize that I could use Lyapunov redesign on Classical Digital PLLs as well as analog PLLs. In Roland Best's definition, a Classical Digital PLL is one with a digital phase detector, but with analog loop filters and an analog oscillator. My realization was that once I got to the baseband behavior of the digital phase detector, I was back working with a system well suited to Lyapunov Redesign. |
|---|
| Classical Digital PLLs were the first digital PLLs to appear. However, they are still used today especially in frequency ranges that are relatively high compared to the circuit technology. Examples of this include high speed communication and instrumentation systems, which are exactly the systems I was working on between 2000 and 2004. |
| The paper itself is part excised tutorial from the PLL tutorial paper and part change of variables from the original Lyapunov Redesign of Analog Phase-Locked Loops paper. |
- This paper was presented at the 2003 American Controls Conference, in June, 2003, and is in the conference proceedings. Lyapunov Redesign of Classical Digital Phase-Locked Loops .
Disk Drive History:
| The following two papers are co-authored with my thesis advisor, general role model, and all around good guy, Gene Franklin. The origin of this paper lies in trying to write the disk drive tutorial. It turns out that in order to understand what is going on in a disk drive control loop, one needs to understand the basic history of the technology. |
|---|
-
A brief history of the control systems used in hard disk drives appeared in the June 2002 issue IEEE Control Systems Magazine. The version that appeared in the magazine is A Brief History of Disk Drive Control . It was granted the 2003 Control Systems Magazine Outstanding Paper Award.
-
The original draft had to be substantially reduced to get it into the magazine. Thus, an exerpt from the early portion of the uncut paper provides inisight into the early days of disk drive control. This will be published and presented at the 2002 International Federation of Automatic Control (IFAC) Congress. Disk Drive Control: The Early Days. However, a slightly better version was published the IFAC Annual Reviews in Control (Volume 26, Part 2). Disk Drive Control: The Early Days .
| The first published paper emenating from work at Agilent Labs, the following is on phase-locked loops. |
|---|
Phase-Locked Loops, Part II: Control Centric PLL Tutorial
| When I started learning about phase-locked loops, they were presented to me as a control system. (Thanks to Dan Witmer.) However, most of the control systems analysis that is done on them is only the simplest kind. This is generally because most folks who work on PLLs are analog circuit designers. There is another set of PLL folks who are in the pure digital area, and a set who only work with software PLLs. However, no matter what form they take, they have the character of a nonlinear feedback loop. In most cases, the nonlinearities are easy to linearize. However, the loops generally have this weird hybrid nature. Some of them have analog and digital pieces (digital logic for the phase detectors coupled with analog filters). Some are purely digital, but are implemented using the analog equations. So, as I was writing a software simulator for some PLLs, I ended up approaching the problem from the control loop perspective once again. This resulted in this tutorial. These are different versions of the public paper. |
|---|
-
This tutorial, Phase-Locked Loops: A Control Centric Tutorial , was given at the 2002 American 2002 American Controls Conference, May, 2002, and is in the conference proceedings. The paper and talk slides are here.
-
The ACC tutorial was necessarily limited by the page count. I have allowed more material in an unpublished version of the tutorial, also called: Phase-Locked Loops: A Control Centric Tutorial .
-
A few years later, I gave an updated version of the talk at Clemson University.
| By this time, I was at Agilent Labs, having transferred from HP Labs. However, my publications were still based on the work at HP Labs on storage systems. |
|---|
| In 2000, I was asked to participate in a tutorial session on disk drive control at the 2001 American Control Conference. Realizing that there were plenty of good talks coming on the hard disks, I tried to find something I could talk about that would be unique. Having worked on both hard disks and optical disks, I decided to do a talk that compared these two disk drive control systems. |
|---|
- This is a tutorial given at the 2001 American 2002 American Controls Conference, June 25, 2001, and is in the conference proceedings. Magnetic and Optical Disk Control: Parallels and Contrasts Both the paper and the references are here. I had to break them up to get past page restrictions.
High Frequency Wobble Papers :
| What is DVD+RW based on? Pretty much the high frequency wobble. At least, that's the key technology that makes it different from other formats and allows DVD+RW disks to be readable by most existing DVD ROMS and players. I had the original idea due to the PES Pareto work and the coherent demodulation work. I wanted a clean reference signal. Dave Towner was the optical engineer how understood how to generate the signals practical. Our patent is the fundamental patent for this format. Here are some papers on the subject. |
|---|
-
This treatment of the subject focuses more on the servo tricks played to improve the performance of the wobbles. It was presented at the 2000 American Controls Conference, June 29, 2000, and is in the conference proceedings: Turning the Tracking Problem Sideways: Servo Tricks for DVD+RW Clock Generation . The talk slides are also pretty decent.
-
One version of the paper was presented at the 1999 ODS Conference, July 12, 1999, and is in the conference digest. High Frequency Wobbles: A Write Clock Generation Method for Rewritable DVD That Enables Near Drop-In Compatibility with DVD-ROMs.
-
A longer version of the paper appeared the conference proceedings and yet another version appeared in the Japanese Journal of Applied Physics. This draft uses the SPIE Proceedings format.
Fuzzy Logic Control, Part II: The Fuzzy versus Conventional Control Debate
| At the 1998 IEEE Conference on Decision and Control, there was a debate between Michael Athans and Lotfi Zadeh on merits of fuzzy control versus non-fuzzy control. As part of the IEEE Control Systems Society History Committee, I was involved in the organization and video recording of the event. I wrote some thoughts about this debate into a draft which was later split into two documents by the editor of the IEEE Control Systems Magazine. Furthermore, the section where I critiqued the debate, debunking what I thought were bogus arguments was removed. Finally, the copy editor didn't like my writing style and -- to my mind -- rephrased a bunch of stuff according to his own style. So, here are the original drafts of two documents that eventually appeared in the June 1999 IEEE Control Systems Magazine. |
|---|
-
The debate report, co-authored with Prof. Linda Bushnell, who is head of the IEEE CSS History Committee and did the bulk of organizing the event. It is basically sections 1-3 of the original draft. Report on the Fuzzy versus Conventional Control Debate . An edited version of this appeared in the June 1999 IEEE Control Systems Magazine.
-
The opinion piece: basically section 5 of the original draft. Fuzzy Control as a Disruptive Technology . An edited version of this appeared in the June 1999 IEEE Control Systems Magazine.
Customizable Coherent Demodulator Papers :
- This version of the paper was presented at the 1998 ACC, June 26, 1998. Customizable Coherent Servo Demodulation for Disk Drives .
- This version of the paper was published in September 1998 IEEE/ASME Transactions on Mechatronics. Customizable Coherent Servo Demodulation for Disk Drives.
| PES Pareto is a methodology of decomposing baseline noise sources in hard disk drives that Terril Hurst and I invented in 1995 while working at HP Labs. Actually, Dick Henze had a key inspirational piece of the invention, and so is on the papers and the patent. The method allowed us to stack together individual noise sources and see how they contribute to the Position Error Signal (PES) in a hard disk. |
|---|
| When HP exited the disk drive business in 1996, we ended up publishing these papers. It turns out that this method became a standard in the disk drive industry. Terril and I were invited to come to Quantum and present the work. Even now, over 10 years later, I can go to a disk drive control session at the American Control Conference and someone will mention doing a Pareto of the system, meaning a decomposition of the noise. |
- PES Pareto Overview (TMRC):
I presented this summary
of the PES Pareto Method at TMRC (literally The
Magnetic Recording Conference) in September 1997.
It is entitled: An Overview of the PES Pareto Method for
Decomposing Baseline Noise Sources in Hard Disk Position
Error Signals . Here are the various pieces of the
publication:
- The two page digest in Adobe Acrobat format.
- The talk was extremely well received. The color slides of the talk are available in Adobe Acrobat format.
- The paper itself will appear in the January 1998 IEEE Transactions on Magnetics in Adobe Acrobat format.
-
PES Pareto Papers (ACC): Terril and I presented papers to the 1997 American Control Conference (ACC) on the PES Pareto Method. This is the more complete set.
The PES Pareto Method: Uncovering the Strata of Position Error Signals in Disk Drives: paper and talk slides. This part describes the general method.
-
Measurements for the PES Pareto Method of Identifying Contributors to Disk Drive Servo System Errors paper and talk slides. This part describes what measurements are made and how.
-
Decomposition of Baseline Noise Sources in Hard Disk Position Error Signals: paper and talk slides. This part puts together the measurements with the method to generate the frequency domain strata of the disk drive PES> It was pretty amazing when it all came together.
-
Tutorial Session on Forgotten Signals in Control (CCTA 2020): I presented papers to the IEEE Conference on Control Systems Technology (CCTA) in 2020. There was a Pareto tutorial and a demodulation tutorial.
-
A Tutorial on PES Pareto Methods for Analysis of Noise Propagation in Feedback Loops , by Daniel Y. Abramovitch, was given at the 2020 IEEE Conference on Control Systems Technology, Montreal, Canada, August 24-26, 2020, and is in the conference proceedings. It reintroduces PES Pareto to the world in a tutorial fashion, extending it beyond the original disk drive centric view.
-
The Demod Squad: A Tutorial on the Utility and Methodologies for Using Modulated Signals in Feedback Loops , by Daniel Y. Abramovitch, was given at the 2020 IEEE Conference on Control Systems Technology, Montreal, Canada, August 24-26, 2020, and is in the conference proceedings. It is a tutorial on how control engineers can use improved demodulation methods to lower noise sensitivity and latency of control systems. It is the next logical step once one has understood PES Pareto.
-
Fuzzy Logic Control, Part I: Some Crisp Thoughts
| At some point in the KittyHawk work, I was looking for methods to deal with the pivot friction and put fuzzy logic as a bullet item on a poster. Hey it was in the trade press, so it was worth a bullet line for a possible method. In the end, my search to try to find out how fuzzy logic actually worked led to a set of notes. Those notes got turned into a paper, entitled Some Crisp Thoughts on Fuzzy Logic . This paper made me very popular with control engineers and very unpopular with fuzzy logic proponents. Apparently, I was burned in effigy on comp.ai.fuzzy, but I have never been able to track down the archived messages. None of these guys ever sent me email explaining why they thought I was wrong. I'm guessing they got distraced by the Kirk-Picard debate. |
|---|
| The point that was lost, though, was that I was never against fuzzy logic itself, any more than I would be against a computer chip. What I was opposed to was the way the followers of Lotfi Zadeh overhyped the technology without ever explaining how it worked. When I started to understand how fuzzy logic was solving the problems that it was supposed to be solving, I wrote it down. When I did that, a lot of the magic and mythology disappeared, leaving it a lot closer to what Lotfi had originally invented. |
- At the 1994 American Control Conference in Baltimore, MD, I presented the paper . The talk slides are also here.
- I gave an intermediate version of this talk in Berkeley, March 10, 1994, at the invitation of Lotfi Zadeh.
| The KittyHawk drive was HP's attempt at a 1.3" disk drive. The project would later be abandoned and be described in Clayton Christensen's book, The Innovator's Dillema. One of the technical issues was that friction became a much larger issue. Here are 3 papers describing some of the work on that. Also, external shock and vibration were a major issue, so there are some papers on that. |
|---|
Accelerometer Feedforward Disturbance Cancellation in Disk Drives
| One of the problems to be solved was that of rejecting rotational disturbances in a mobile drive. While disk drive actuators are balanced so that they are relatively immune to translational shock and vibration, they still need to be able to rotate to get to the data. Thus, they are succeptible to rotational disturbances. |
|---|
- A paper entitled
Rejecting Rotational Disturbances
on Small Disk Drives Using Rotational Accelerometers
by Daniel Abramovitch:
- The paper from the Proceedings of the 1996 International Federation of Automatic Control (IFAC) World Congress in San Francisco, CA.
- A slightly edited version appeared in a 1997 issue of Control Engineering Practice.
- There were several versions of the overhead slides. What was presented at the IFAC poster session is available here.
- Parts of this work form
the basis for
US Patent # 5663847, noted below.
- A paper entitled
Mitigating Rotational Disturbances on a Disk Drive with Mismatched
Linear Accelerometers
by Daniel Y. Abramovitch and George Hsu:
- The paper was given at the 2015 IEEE Conference on Control Applications (CCA), Part of 2015 IEEE Multi-Conference on Systems and Control September 21-23, 2015. Sydney, Australia, and is in the conference proceedings.
- Parts of this work form
the basis for
US Patent # 7768738, noted below.
| As drives shrink, the effect of friction becomes more pronounced. Here is some work that I did (along with Feei Wang) to study the pivot friction in the KittyHawk. |
|---|
-
A paper entitled Disk Drive Pivot Nonlinearity Modeling Part I: Frequency Domain by Daniel Abramovitch, Feei Wang, and Gene Franklin which was presented at the 1994 American Controls Conference in Baltimore, MD.
- A paper entitled
Disk Drive Pivot Nonlinearity
Modeling Part II: Time Domain
by Feei Wang, Daniel Abramovitch, and
Gene Franklin
which was presented at the 1994 American Controls
Conference in Baltimore, MD.
- A paper entitled
A Method for Verifying
Measurements and Models of Linear and
Nonlinear Systems
by Feei Wang, Daniel Abramovitch, and Gene
Franklin which was presented at the 1993 American Controls
Conference in San Francisco, CA.
Banshee Multivariable Workstation
| My first experience with high speed DSP was in generating this testbed system. I got a Banshee board from Atlanta Signal Processing, Inc. and then wrote an interface to it that would allow me to dump filters from Matlab into a running system. I learned a bunch about DSPs, latency, data standards, and how to capture real time data from this system. One patent (with Carl Taussig) came out of this which extended a frequency response function loop unwrapping method used in SISO systems to MIMO systems. |
|---|
- A paper entitled
The Banshee Multivariable Workstation: A Tool for Disk
Drive Servo Research
which was presented at the 1992 ASME Winter Annual Meeting in Anehiem,
CA and was later published in the
ASME Advances in Information
Storage Systems (Vol. 5, 1993).
This papers describes the floating point DSP based test
system that I generated in the early work on optical drives
and then used with the KittyHawk to test out servo algorithms.
It had the neat capability of being able to take designs
out of Matlab and drop them into a running, MIMO servo
loop on a floating point DSP system. This was back
in 1991, when that kind of stuff wasn't that common.
Frequency Response Functions Above the Nyquist Rate
| When I first arrived at HP Labs, Carl Taussig was extending some work originated by Rick Ehrlich on generating frequency response functions at frequencies beyond the Nyquist Rate. My role was to clear up the presentation of the work. The basic idea is that if we stimulate the sampled-data system with narrow band stimulus (e.g. a pure sine wave) at a frequency above the Nyquist frequency the response will be aliased into the lower bands. However, since the stimulus is narrow band, there is nothing else in the low frequency region for it to interfere with. So, with a little bit (or maybe a lot) of math, one can back out the response of the physical system at the stimulus frequency. This becomes a lot harder when a feedback loop is involved, but Rick and Carl showed how it could be done. |
|---|
- A paper entitled
Identification of Sampled Data
Systems at Frequencies Beyond the Nyquist Rate
by Rick Ehrlich, Carl Taussig, and Daniel Abramovitch
which was presented at the 1989 IEEE Conference on Decision and
Control in Tampa, FL.
Phase-Locked Loops, Part I
| An early forray into phase-locked loops. Back in December of 1987, I was working at Ford Aerospace Western Development Labs in Palo Alto. Dan Witmer walked into my cubicle and asked my how I would deal with understanding the nonlinear behavior of a phase-locked loop (PLL). I asked what was a PLL, and he proceeded to describe it in terms of a simple feedback loop. So, I naively said, "I'd use Lyapunov Redesign," a control analysis method. Eventually, I ended up doing just that. |
|---|
| This was a second lesson in my maturation as an engineer. Just as I had learned in my thesis work that I didn't like extending theory in the absence of a physical system, I learned here that when I was motivated by the appropriate system, I could find and extend the appropriate theory pretty easily. |
-
A paper entitled Lyapunov Redesign of Analog Phase-Lock Loops by Daniel Abramovitch which was presented at the 1989 American Controls Conference in Pittsburg, PA and was later published in the IEEE Transactions on Communications (Vol. 38, No. 12, December 1990).
-
A paper entitled Analysis and Design of a Third Order Phase-Lock Loop by Daniel Y. Abramovitch which was presented at the 1988 IEEE Military Communications Conference in San Diego, CA.
Adaptive Control of Nonlinear Systems
| This is the work that eminated from my thesis work. There were two papers that emerged from this, on how the adaptive control algorithms could be still shown to be stable when the actuator saturated. However, I was never overly pleased with this theoretical work. |
|---|
| In retrospect, this was a key lesson in my education as an engineer: that I really didn't enjoy sitting in an office trying to extend theory. It would only be after I started working at Ford Aerospace in December of 1987 that I was introduced to phase-locked loops, and learned a lesson about how I could do theory. |
-
Adaptive Control of Nonlinear Dynamic Systems. , by Daniel Y. Abramovitch. PhD thesis, Stanford University, 1988.
-
A paper entitled On the Stability of Adaptive Pole-Placement Controllers with a Saturating Actuator , by Daniel Y. Abramovitch and Gene F. Franklin. This appeared in the March 1990 issue of the IEEE Transactions on Automatic Control. An earlier version appeared in the Proceedings of the 26th IEEE Conference on Decision and Control, in December 1987.
-
A paper entitled Adaptive Control with Saturating Inputs , by Daniel Y. Abramovitch, Robert L. Kosut, and Gene F. Franklin. This appeared in the Proceedings of the 25th IEEE Conference on Decision and Control, in December 1986.